Adaptive Heuristic Exploration for Autonomous Mapping on Turtlebot

This project implemented autonomous exploration and mapping algorithms on a Turtlebot equipped with an RGB-D Kinect camera, which provided a limited 57° horizontal field of view. The exploration strategy
Manipulator Trajectory Optimization Using Interior Point Methods
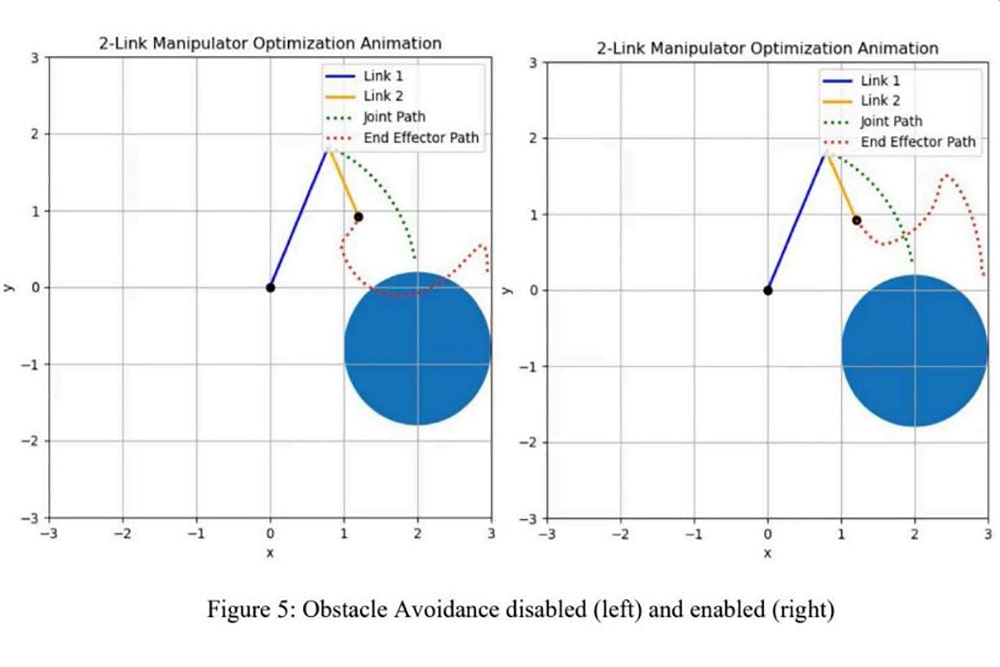
This project explored trajectory planning for a 2-link, 2 DOF robotic manipulator using a direct optimal control framework implemented via interior-point optimization (IPopt) in CasADi. Simulations were
Sampling-Based Motion Planning: Speed vs. Optimality
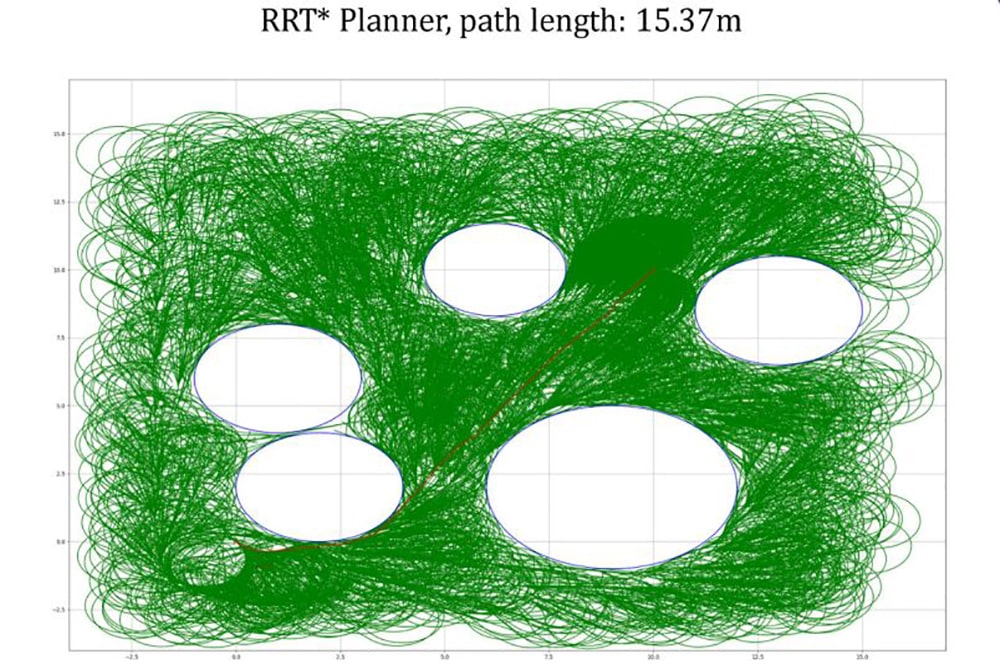
I implemented RRT and RRT* planners in Python for a Dubins-type vehicle navigating a 2D space with circular obstacles, respecting nonholonomic constraints. RRT quickly generated feasible paths but with
Drift Resilient Visual Odometry with Stereo Vision
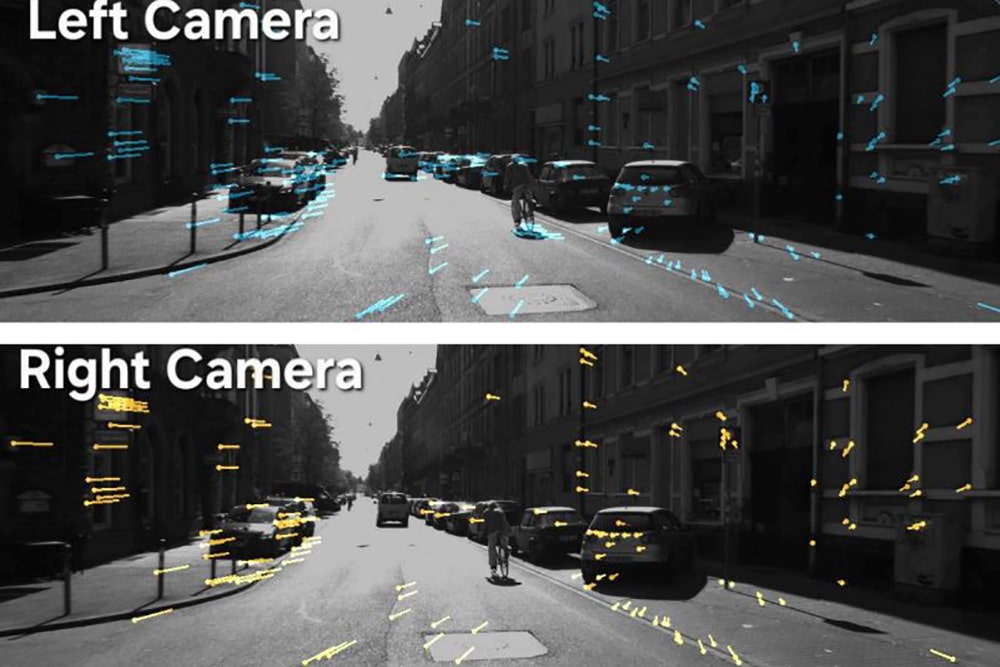
In this project, I implemented a stereo camera-based visual odometry pipeline using the KITTI dataset to estimate vehicle pose through 3D motion tracking of surrounding features from both lenses.
EKF-Based Probabilistic Localization Using Sensor Fusion

In this project, I implemented an Extended Kalman Filter (EKF) to perform 2D localization of a mobile robot navigating a forest of cylindrical obstacles. The robot s pose was estimated by fusing wheel odometry
Maze Navigating Robot Localization Using 2D LiDAR and Particle Filter SLAM

In this robotics project, our team developed an omnidirectional robot capable of localizing and navigating within a 4×8 ft checkered maze. I led the software implementation, with a primary focus on localization
Robust Visual Navigation Using Semantic Segmentation and Sensor Fusion

As part of my Master’s at the University of Toronto, I developed the visual perception system for TRAILbot—an autonomous robot from the Toronto Robotics and AI Laboratory (TRAIL) designed to navigate hiking
YOLO-Driven 3D Traffic Mapping from Stereo Camera

I developed a computer vision pipeline using Python, OpenCV, and YOLOv3 to estimate depth, detect vehicles, and segment individual cars from stereo images in the KITTI dataset. Calibration data was used to continue
Georeferenced Ground Targets Using UAV Imagery

I developed a target localization system in Python using onboard imagery and pose data from a Parrot AR.Drone 2.0 operating in a Vicon motion capture environment. The drone’s downward-facing camera
3D Point Cloud Matching Using SVD and ICP

I implemented the Iterative Closest Point (ICP) algorithm in Python to solve 3D point cloud registration, a core task in robotic perception. Using realworld scan data from the Stanford 3D Scanning Repository,