Dynamic Modeling and Control of a UAV in Simulink
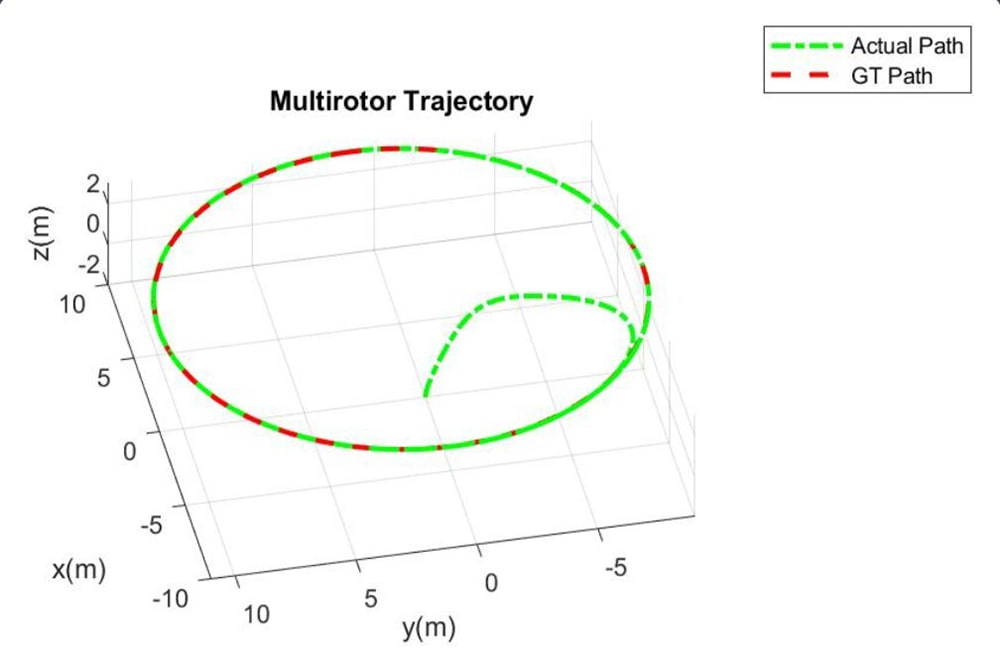
I developed a multi-rotor control system in MATLAB and Simulink, focused on modeling and simulating the dynamics and control of a quadrotor UAV. Using first-principles aerodynamics and a state-space representation
Sim to Real Drone Racing with RRT* Planning

I implemented a sampling-based motion planning system for autonomous drone racing using the Crazyflie quadrotor. The system used RRT* to generate time-optimal, collision-free trajectories through four